
Beyin Teknolojisinden İlham Alan Çip, Araçlara Gerçek Zamanlı Görüş Yetisi Sağladı
Otonom araçların ve robotların çevreyi algılama ve tepki verme hızları, istenen işleri başarılı bir şekilde yerine getirebilmeleri için büyük önem taşımaktadır. Bu bağlamda, Çin’deki Beihang University araştırmacıları tarafından gerçekleştirilen yeni bir araştırma, hareket algılama işlemlerini mevcut optik akış yöntemlerine göre dört kat daha hızlı gerçekleştirebilen yeni bir görüş sistemi geliştirmiştir.
Bu çalışma, otonom araçlardan endüstriyel robotlara, cerrahi sistemlerden insansı robotlara kadar, makinelerin reflekslerini önemli ölçüde artırma potansiyeline sahip.
Araştırmanın odağında nöromorfik mühendislik yer alıyor. İnsan beyninin işleyiş biçimlerinden ilham alan bu yaklaşım, geleneksel işlemcilerin aksine bellek ve hesaplama birimlerini tek bir yapıda birleştirerek çalışır. Bu yöntemle veri aktarımındaki gecikmeler azaltılmakta ve enerji verimliliği artırılmaktadır. Nöromorfik donanımlar, makine algısı ile insan algısı arasındaki farkı kapatmanın en umut verici yollarından biri olarak değerlendirilmektedir.
LGN’den Silikona
Projeye liderlik eden robotik uzmanı Shuo Gao ve ekibi, beynin az bilinen ancak hayati bir bölgesi olan LGN’den (lateral genikulat çekirdek- lateral geniculate nucleus) ilham almıştır.
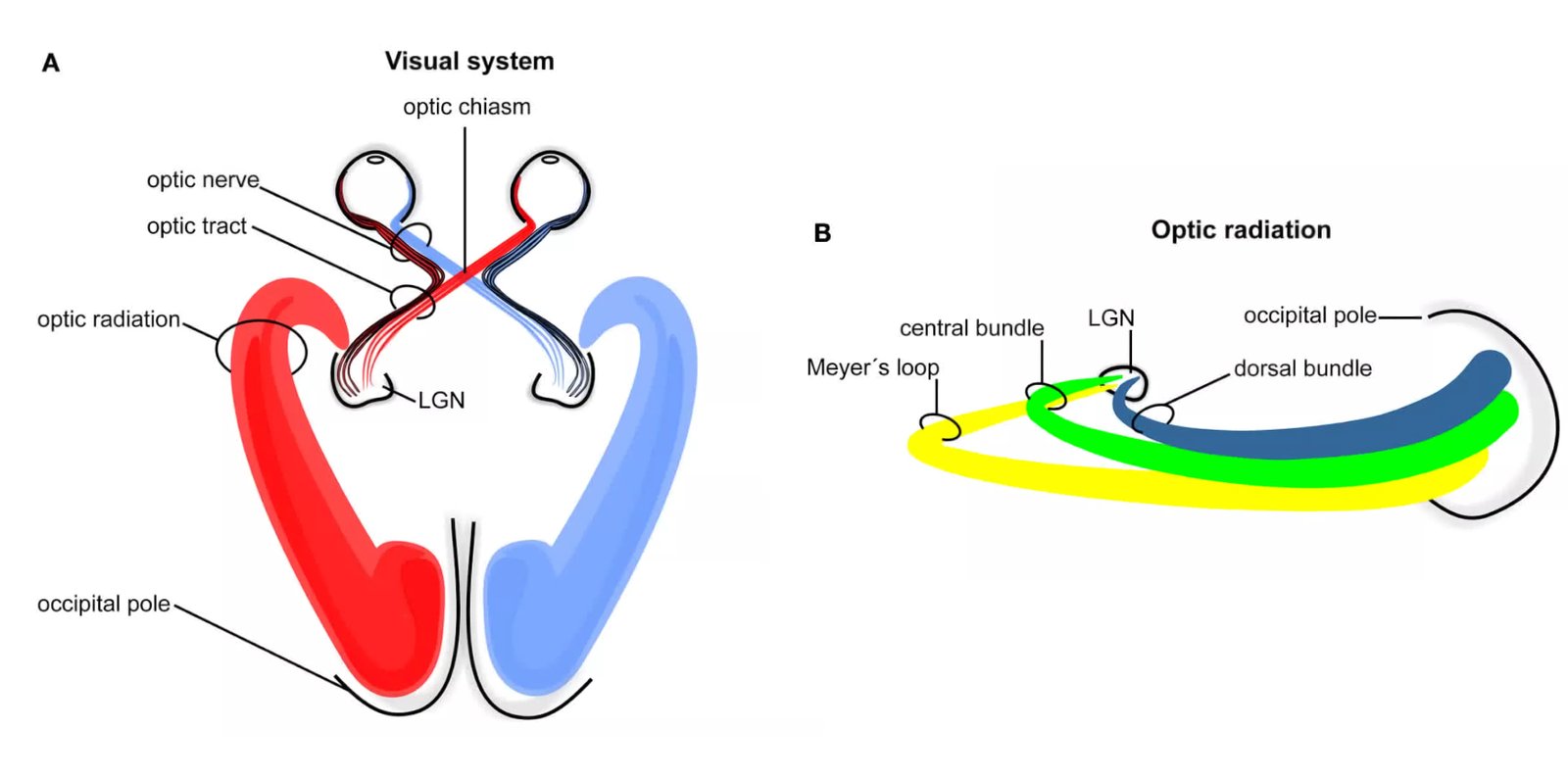
Araştırmacılar, bu “seçici dikkat” mekanizmasını silikon tabanlı bir mimariye entegre etti. Geleneksel robotik görüş sistemlerinde kameralar sabit kareler alır ve optik akış algoritmaları, ardışık kareler arasındaki değişimleri izleyerek hareketi hesaplar. Bu yöntem güvenilir olsa da, tek bir karenin işlenmesi yarım saniyeden fazla sürebilir. Örneğin, otoyolda 110 km/s hızla giden bir otonom araç için bu gecikme, sistemin “kör” olduğu anlamına gelen yaklaşık 15 metrelik bir kaybı ifade eder.
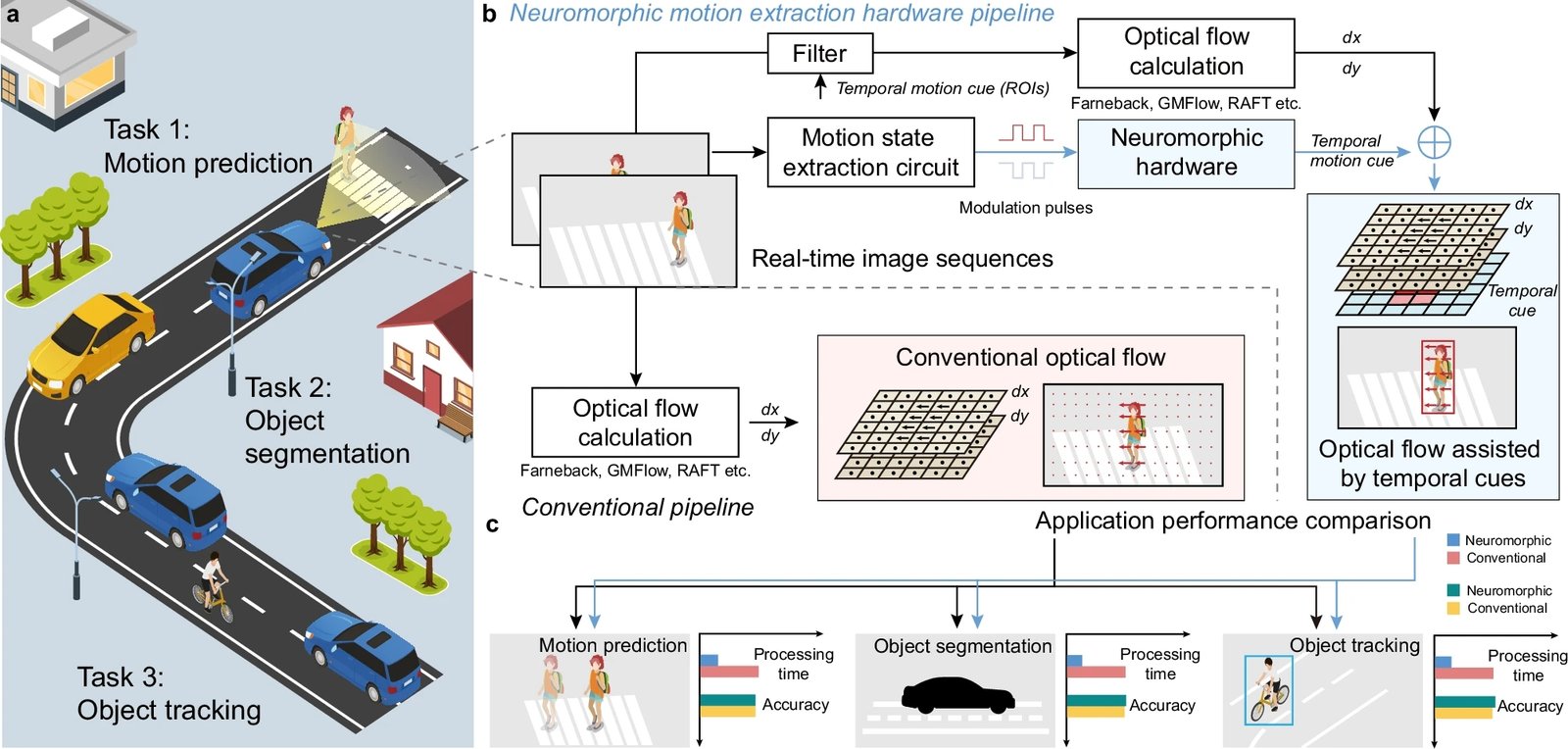
Simüle edilmiş sürüş senaryoları ve robot kol görevleri gibi testlerde, prototip sistem işleme gecikmesini yaklaşık yüzde 75 oranında düşürdü. Ayrıca karmaşık manevralar sırasında hareket takibi hassasiyetinin iki katına çıktığı bildirildi. Bu bulgular, ani yön değişimleri veya yoğun trafik gibi dinamik ortamlarda sistemin belirgin bir avantaj sunduğunu göstermektedir.
Elde edilen veriler etkileyici olmasına rağmen, yeni mimari nihayetinde görüntü yorumlama aşamasında hâlâ geleneksel optik akış algoritmalarına ihtiyaç duymaktadır. Bununla birlikte, birden fazla hareketin üst üste bindiği, görsel açıdan kalabalık ortamlarda performans zorlukları yaşanabilmektedir. Yine de, elde edilen kazanımlar, klasik donanım yapılarıyla karşılaştırıldığında dikkate değer bir ilerlemeyi temsil etmekte ve makinelerin algılama hızının insan seviyesine yaklaşabileceğini, hatta bazı durumlarda bunu geçebileceğini göstermektedir.

